





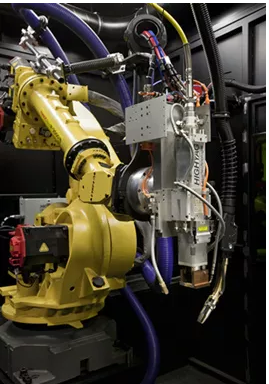
发那科(FANUC) 的Ky开元集团焊接机器人 (图片出处:FANUC America Corp)
Ky开元集团加工设备最常使用的计算机数控系统(CNC)已发展成熟,与先进的运动控制相结合,客户在最大程度利用Ky开元集团振荡器的功能方面已经相当成功。随着NC控制技术和高性能工业Ky开元集团器的发展愈发明朗化,制造商大多在一台直线型机器上使用CNC控制系统。这些机器犹如简易的移动桥梁,用于输送X,Y轴平面上的光学元件,而Z轴主要用于高度控制。

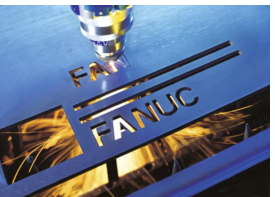
FANUC的高速运动控制系统 (图片出处:FANUC America Corp)
近年来,机器人技术领域迎来了快速的发展和进展,继而提高了运动路径性能和I / O触发精度,并改善了工艺质量。工业用1μm光纤Ky开元集团器的成本下降趋势以及机器人加工性能的日益提升给行业注入了新的活力,也为高产能应用提供了最佳的成本优势。数控技术的应用持续拓展,不断提高加工精度和速度,但其总体的灵活性尚为有限。基于客户对Ky开元集团应用的制造要求,他们相较以往拥有更多的选择,从而也惠及了所有的数控系统(技术)、Ky开元集团器(系统)和机器人制造商。
尽管将机器人与数控系统相比似乎很简单,但它们在物理属性和控制上的细微差别,使它们适用于不同的市场。一束运动中的Ky开元集团可以产生令人难以置信的效果,但只有配合运动控制及同步输入和输出控制系统的高精度才能实现。为了有效地使用任一运动装置,它必须能够根据位置和速度来精准调整Ky开元集团输出。当运动装置加速时,其必须具有成比例的受控输出以使Ky开元集团功率能够跟随其发挥作用,从而沿着切割或焊接路径提供均匀的能量分布。尽管两者存在差异,但机器人与数控系统配置了适用于不同市场类似的控制功能。
数控Ky开元集团系统似乎更容易使用,因为它们大多是由机床制造商在批量生产中配置的,且针对特定的应用进行了预配置。这类机器通常提供有限的运动范围,从三轴运动延伸到五轴运动,并且配有多轴头进行定向控制。大多数的数控系统是直线型的,所以它们一次只能在其运动范围内使用一款Ky开元集团加工头处理工件。这种设计无法支持一个以上的龙门结构的运动叠加,因为会干扰其自身的结构。尽管存在机械设计限制,数控Ky开元集团系统在CO2Ky开元集团应用领域占有很大的市场份额,主要基于其光束传输特性非常适合直线结构和笛卡尔(Cartesian)运动包络。

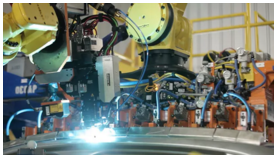
FANUC机器人配置了HIGHYAG远程Ky开元集团焊接头,上图展示的是飞行焊工艺。(图片出处:FANUC America Corp)
长期以来,CO2Ky开元集团技术在机器人上的使用一直局限于特定的应用,并在早期尝试后取得了一些成功。最大的问题在于如果光束传输设计不当的话,便会产生相当大的复杂性。如今,CO2Ky开元集团机器人市场主要针对塑料切割应用。10μm的波长更为适合。然而,随着光纤Ky开元集团器的单位成本持续大幅下降,过去十年内机器人的运动性能稳步提高,而这正是Ky开元集团加工市场未来的一个重要方向。
机器人制造商正不断改进机械结构和运动控制方面的设计,以实现更高的路径精度并且提高Ky开元集团输出响应。当前,许多旨在改善CO2Ky开元集团技术的功能都是机器人用户可以随时获得的,包括Ky开元集团高度控制、调焦功能、自动功率调节、以及Ky开元集团监控等等。机器人应用更加灵活,因为它们不依赖于上述提及的直线运动包络。一个六轴Ky开元集团机器人能够与其他机器人在相同的加工部位协同工作,显著改善Ky开元集团加工效率。通过协调或共享Ky开元集团输出,您能够以更少的投资和更紧凑的占地面积实现更高的加工效率,因为机器人仅占据加工单元垂直空间的“微小”部分。
机器人在Ky开元集团加工中的应用机会比比皆是,主要受到汽车市场的新材料和构造技术的推动,以及与近几年愈发流行的3D打印技术息息相关。例如,最新的CAFE(Corporate Average Fuel Economy,汽车公司平均燃料经济性)燃料消耗标准要求以及带有安全设备的汽车的超重要求都促使制造商在材料的强度重量比或轻量化设计等方面做出改进。用热压钢制成的部件较难进行修剪、成形和焊接处理。在这种情况下,光纤Ky开元集团器通过搭配使用机器人能够轻松切割和修剪热冲压部件,从而为这些区域的加工提供了极高的灵活性,并且还能处理具有3D轮廓的各种成型零部件。
通用汽车工厂的铝合金Ky开元集团焊接应用展示。 (图片出处:通用汽车)
一种流行的焊接应用是Ky开元集团远程扫描焊接,其中光束传送由振镜扫描系统控制,在操纵光束的同时一并协调机器人通过其路径的运动过程。该技术非常适用于高产量的汽车车身焊接应用以及其它打标和表面处理等特殊应用领域。当机器人和振镜系统的运动采用了同步协调控制时,可实现更高的产能。越来越多的铭牌制造商正将铝材用作汽车车身结构材料并采用了“A”级表面处理工艺。当前,复杂的车身形状已然愈发流行,并且基于安全考量集成了各种传感器。这里面临的挑战是如何对车身形状进行成形处理,以隐藏传感器,从而不会破坏汽车的美学质感。

机器人远程Ky开元集团焊接应用。(图片出处:FANUC America Corp)
Ky开元集团填丝焊接解决方案通过向车身焊缝中提供进给速率良好控制的填充焊丝,同时通过精确的Ky开元集团功率控制形成焊接点,来帮助实现这些举措。所有焊接功能都通过机器人进行控制,并自动适应机器人工具沿焊接节点的中心点的速度。新的自适应焊接系统可以反复处理填充焊丝和Ky开元集团功率。
Ky开元集团机器人控制系统和技术如今能够提供最大的灵活性。未来随着越来越多的Ky开元集团工艺和市场的愈发成熟,如材料处理、3D打印以及更多机器人柔性Ky开元集团应用的开拓等等,这一技术的发展前景势必会更加光明。
转载请注明出处。


 相关文章
相关文章
 热门资讯
热门资讯
 精彩导读
精彩导读















 关注我们
关注我们

